
A Computational Design Framework to Optimize Shared Spaces for Human-Robot Collaboration.
Published in IEEE Robotics and Automation Letters, 2024
Recommended citation: Jixuan Zhi and Jyh-Ming Lien. "Improving Human-Robot Collaboration Via Computational Design." IEEE Robotics and Automation Letters 10, no. 2 (2025): 1074-1081. https://ieeexplore.ieee.org/document/10806640
1. Title & Authors
Title: Improving Human-Robot Collaboration via Computational Design
Authors: Jixuan Zhi, Jyh-Ming Lien (George Mason University)
Affiliations: George Mason University
Contact: jzhi@gmu.edu, zhijixuan@gmail.com.
2. Abstract
We propose a computational framework to optimize shared spaces (e.g., kitchens) for human-robot collaboration. By integrating layout design with decentralized multi-agent motion planning, our method reduces task completion time by 20% and minimizes path conflicts. Evaluations show optimized layouts improve efficiency in diverse environments, including compact and L-shaped kitchens.
3. Layman’s Summary
Imagine redesigning your kitchen so humans and robots cook together seamlessly. Our AI acts like a teamwork architect: it arranges counters and appliances to reduce collisions and waiting time. Think of it as ‘Tetris for collaboration’—every piece (human, robot, counter) fits perfectly to boost productivity!
4. Key Visuals
- Figures to Highlight:
- Figure 1: Comparison of inefficient vs. optimized kitchen layouts.
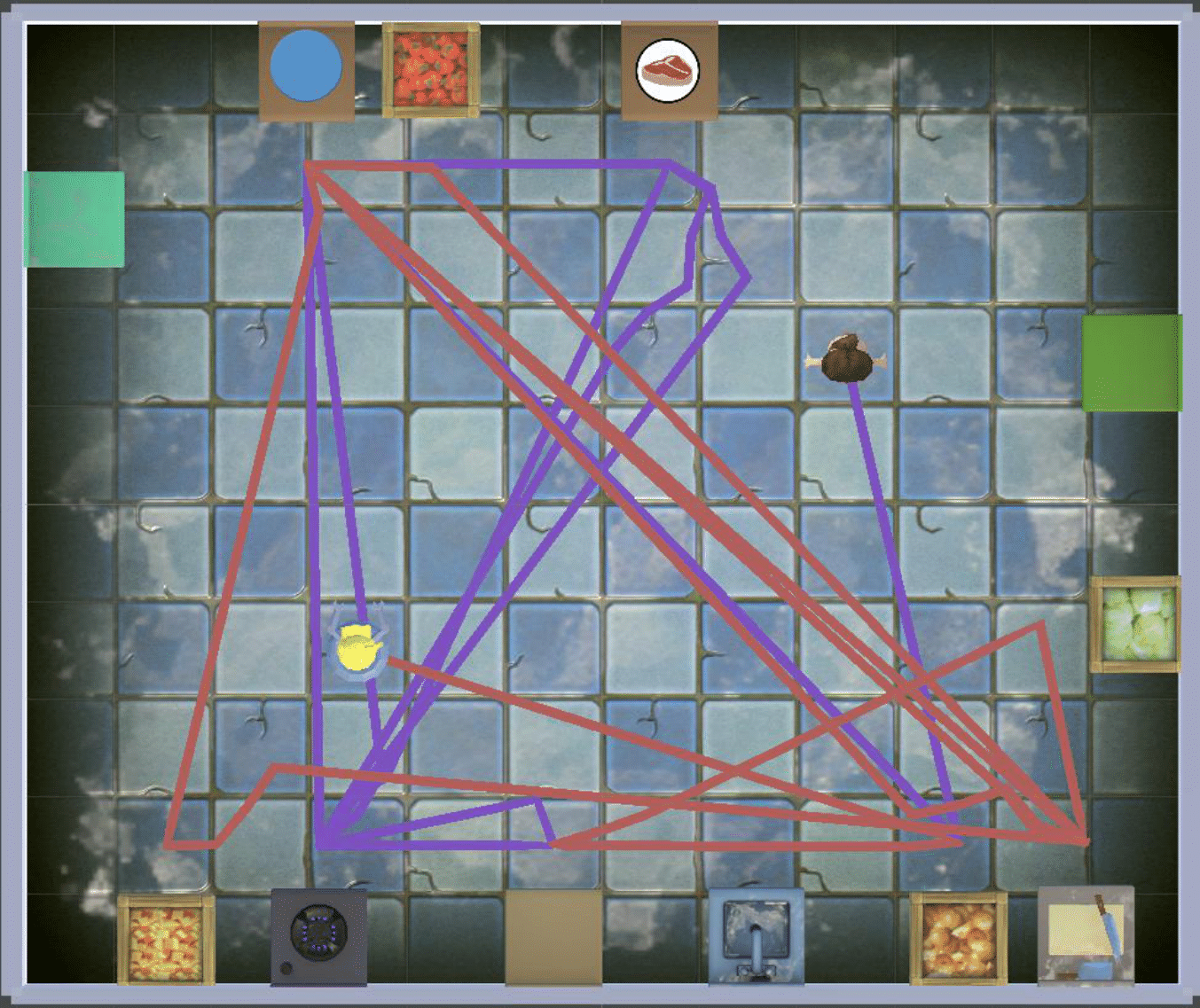
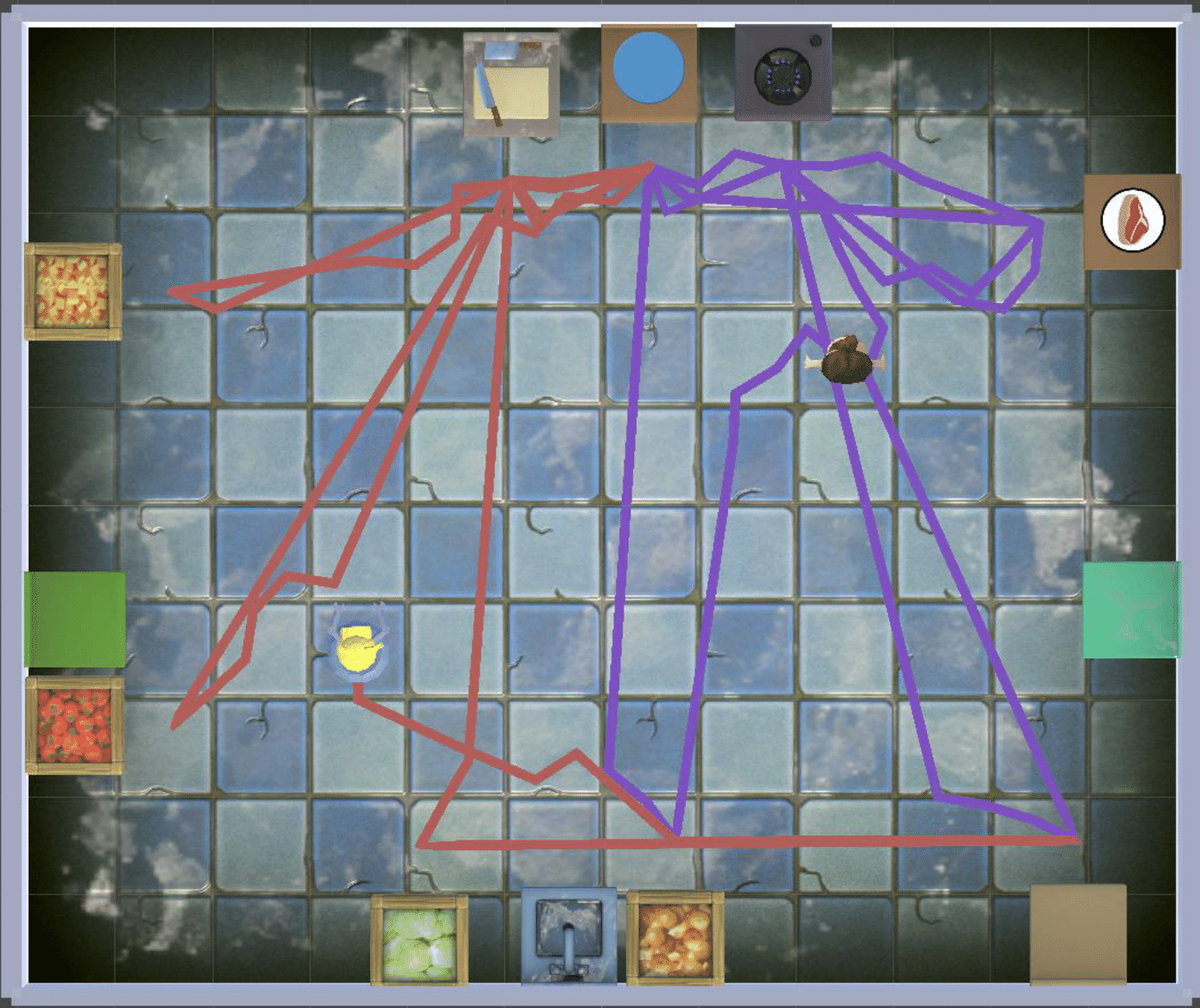
Figure 1: In this example, a human and a robot are tasked to make two burgers together. The kitchen layout on the left leads to worse performance than that on the right generated by the proposed method. The red and purple lines represent the paths of the robot and the human, respectively.
- Figure 6: Four optimized kitchen designs with human/robot paths.
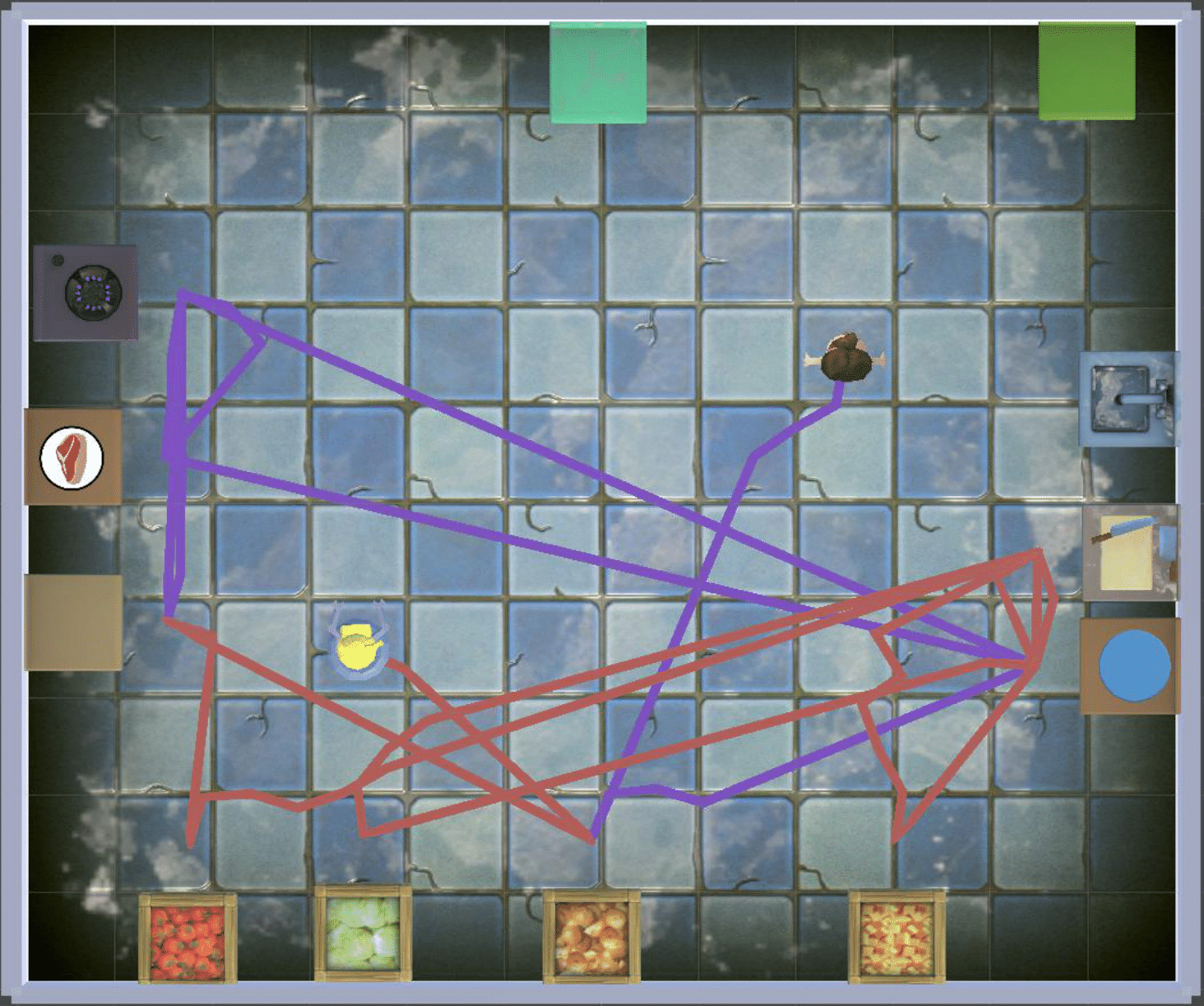
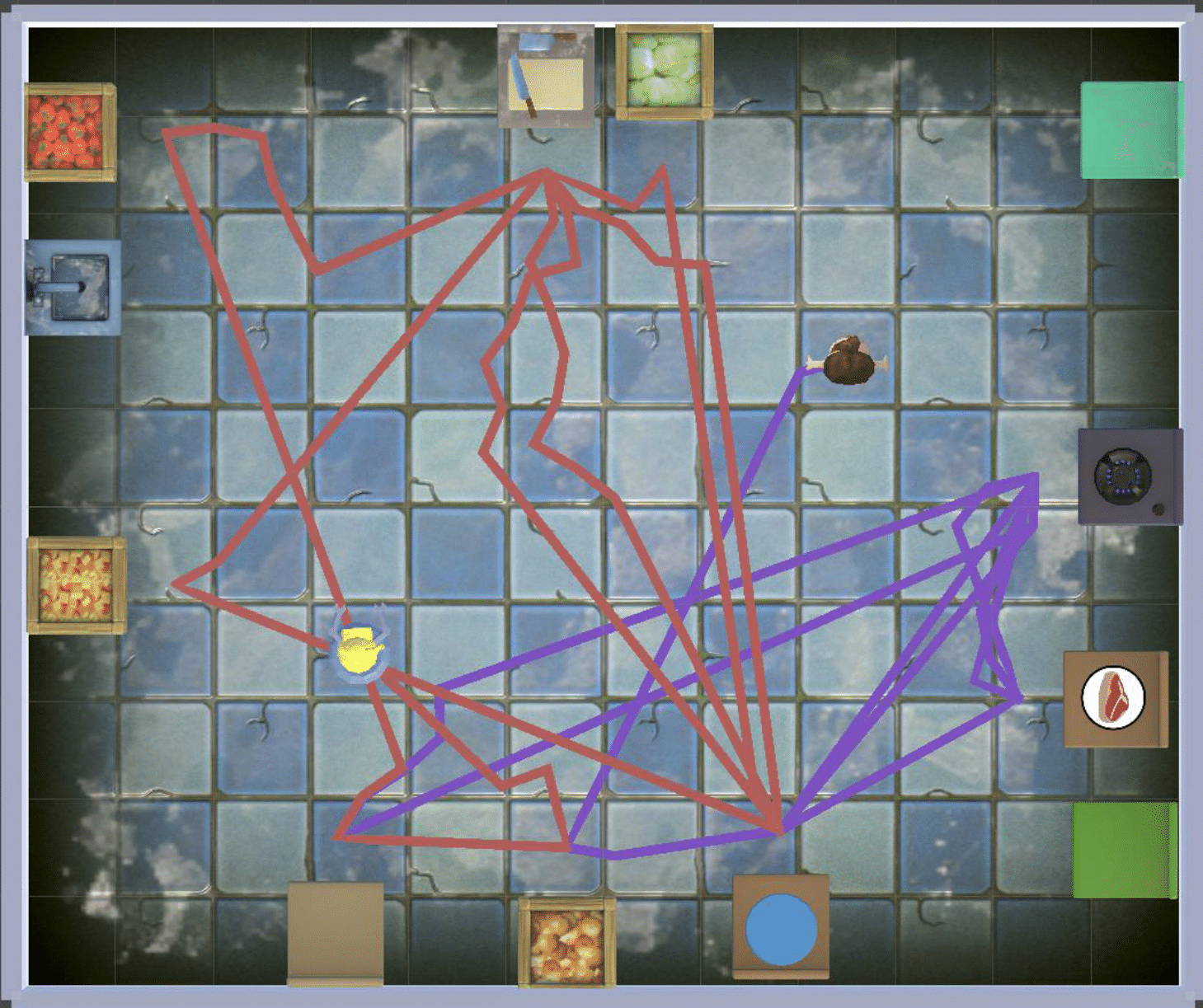
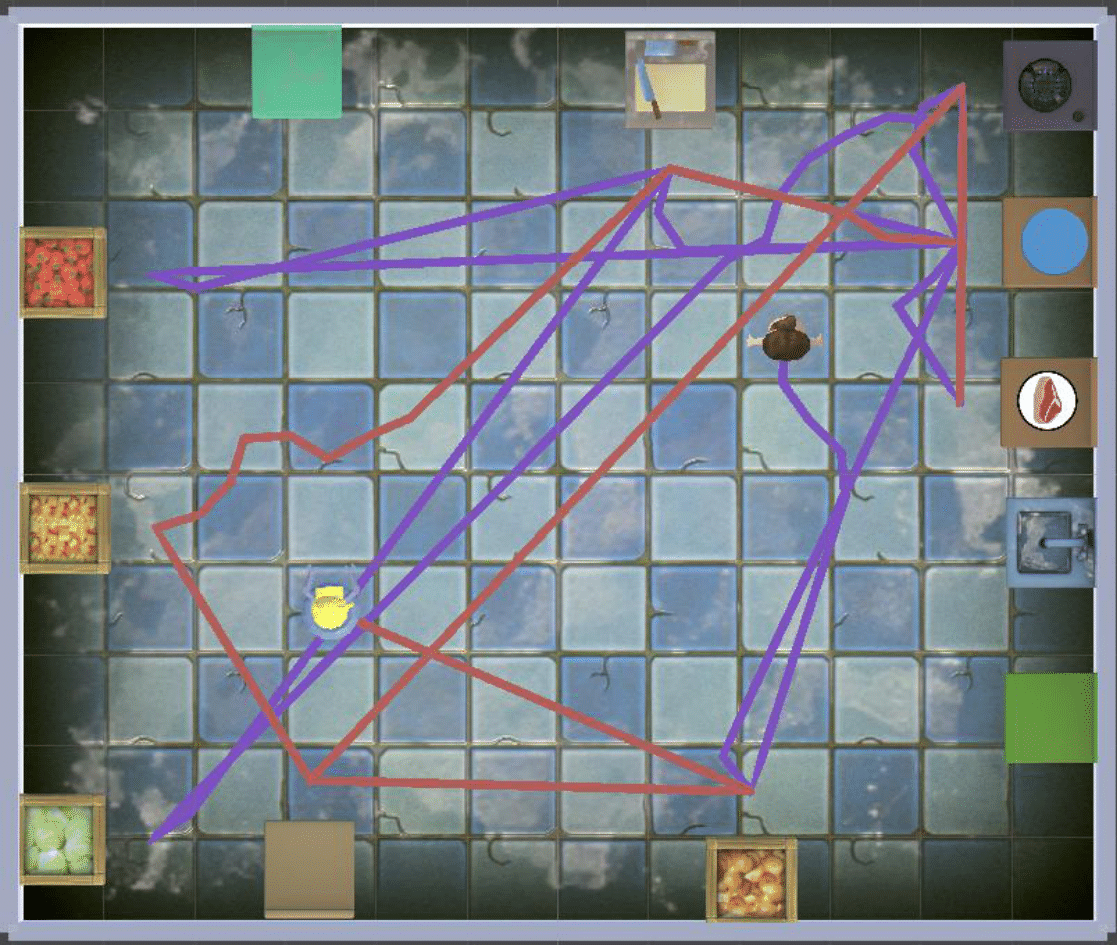
Figure 6: Four optimized kitchen designs. The red and purple lines represent the paths of the robot and the human, respectively.
- Figure 8–9: Cost comparisons across layouts (path length, narrowness, time).
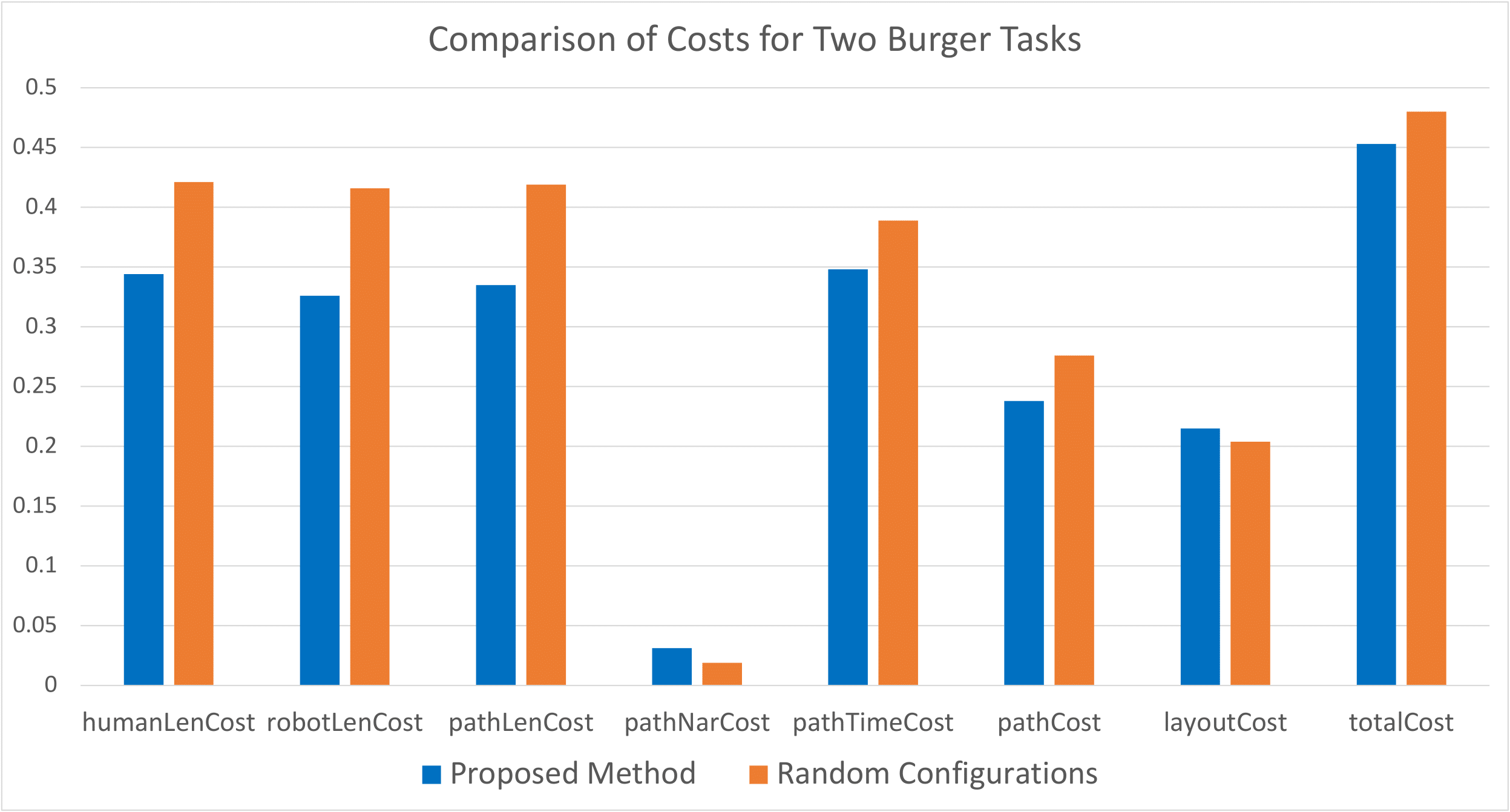
Figure 8: Comparison of costs for the same two burger tasks.
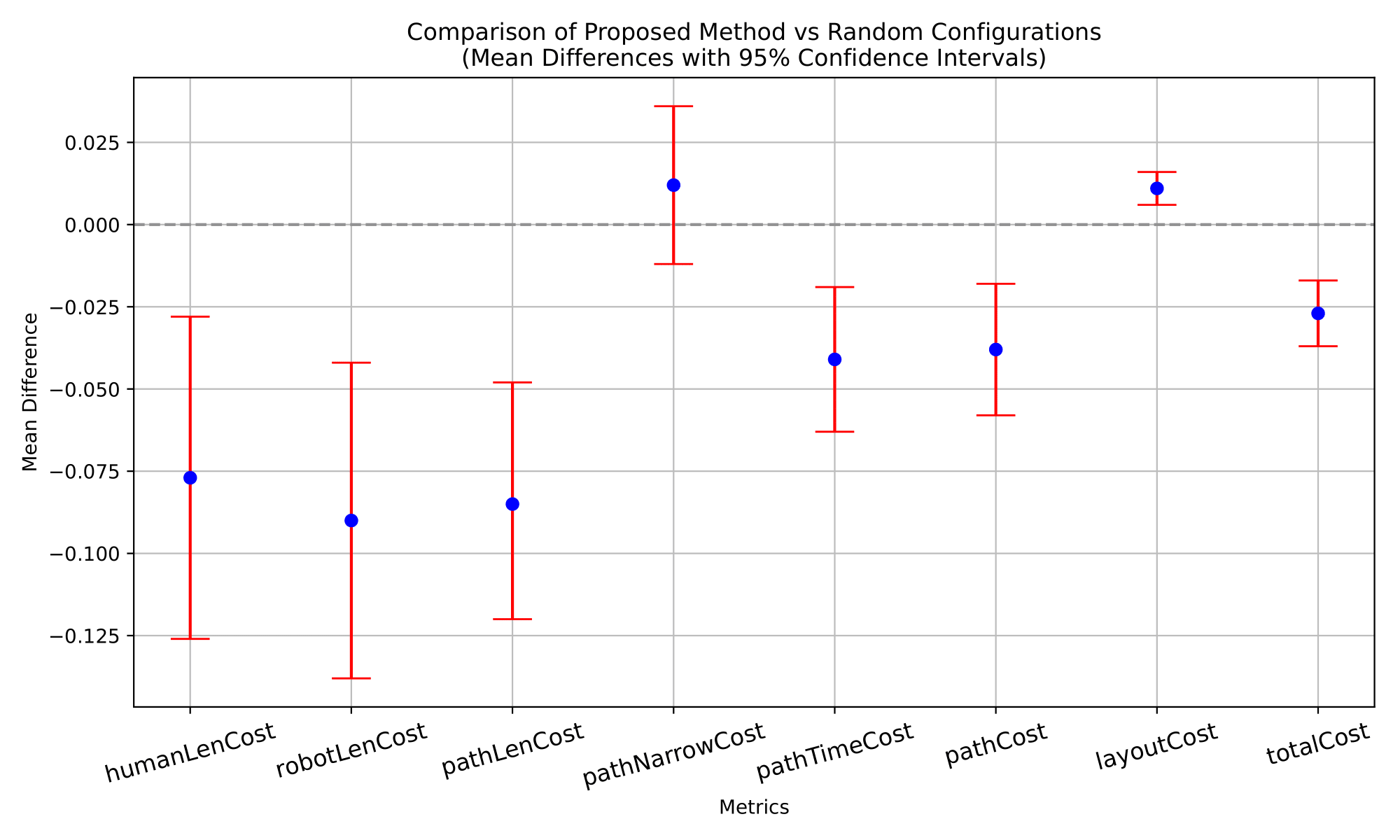
Figure 9: Comparison of Proposed Method vs Random Configurations (Mean Differences with 95% Confidence Intervals).
- Figure 11: Two L-shaped optimized kichen designs with human/robot paths.
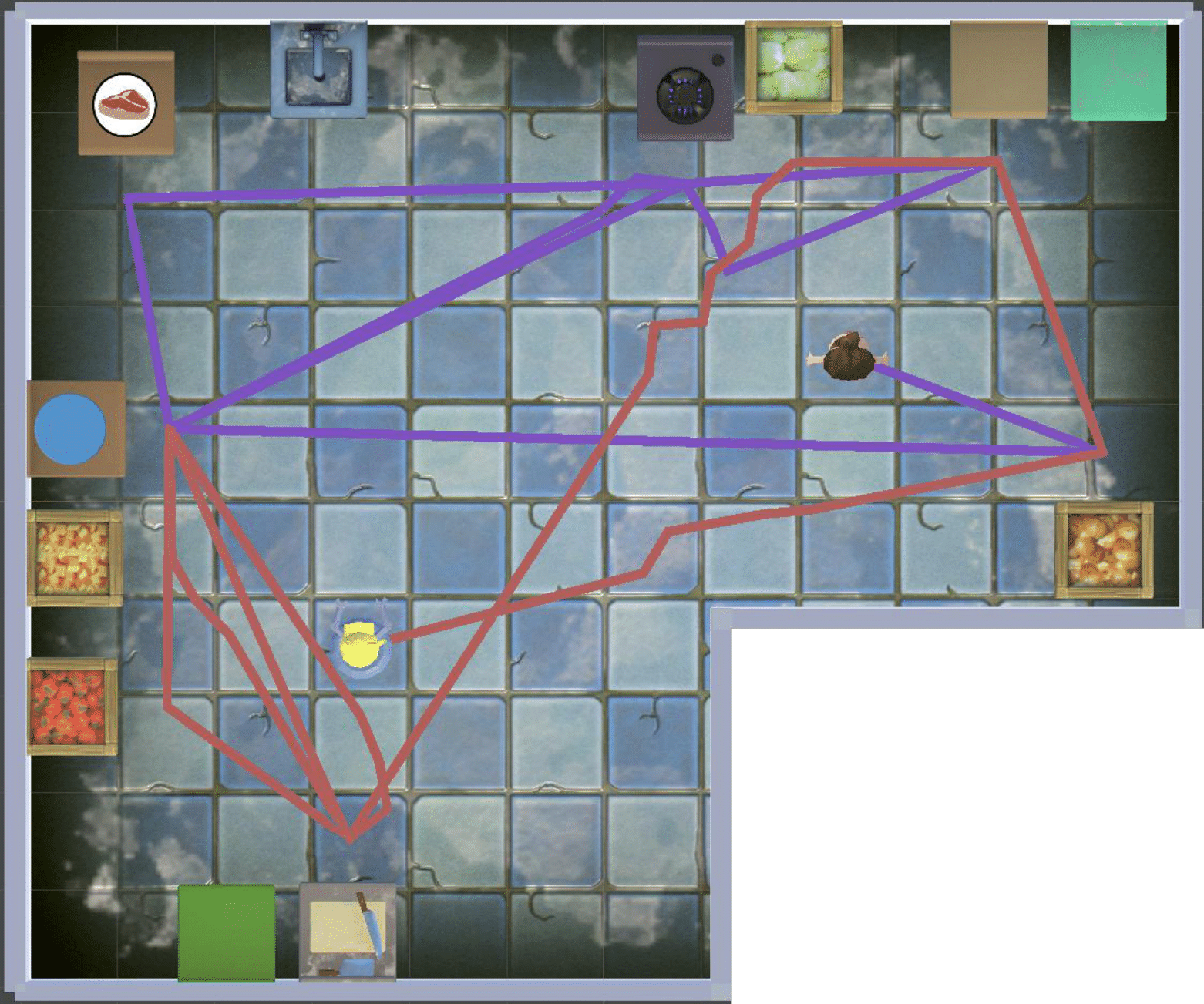
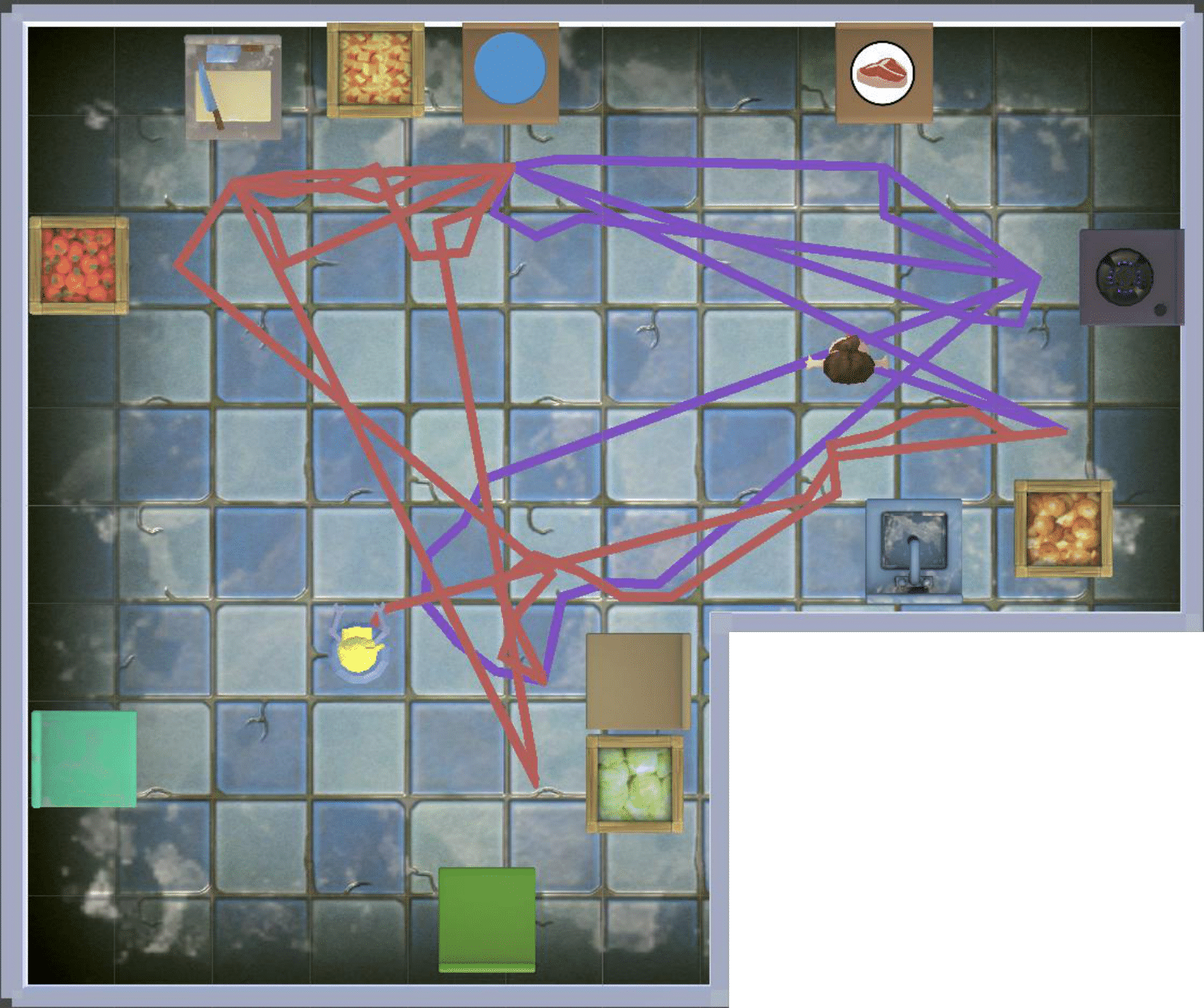
Figure 11: Two kitchen designs with an L-shape room.
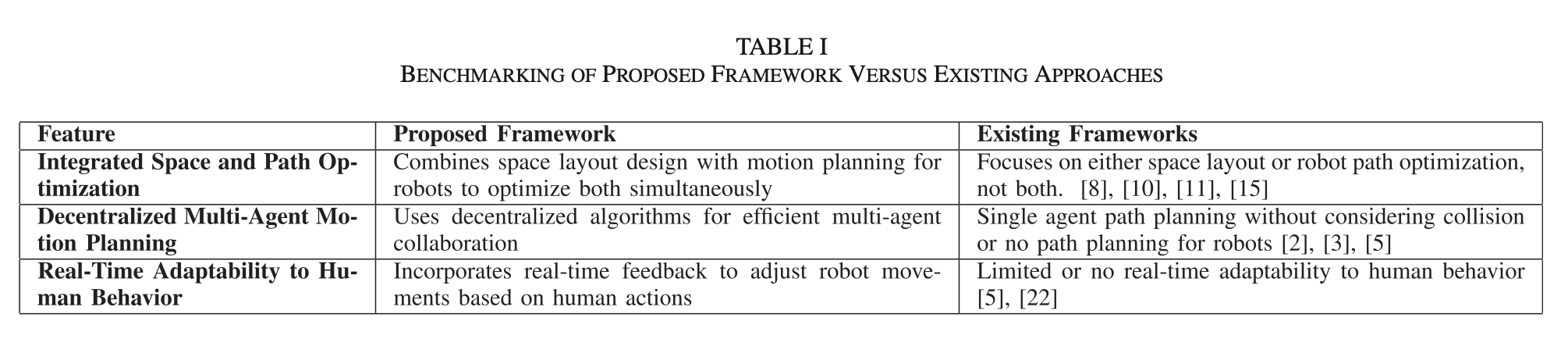
- Table I: Benchmarking against existing frameworks.
- Figure 1: Comparison of inefficient vs. optimized kitchen layouts.
- Infographics:
- Workflow: Recipe planning → multi-agent motion planning → layout optimization.
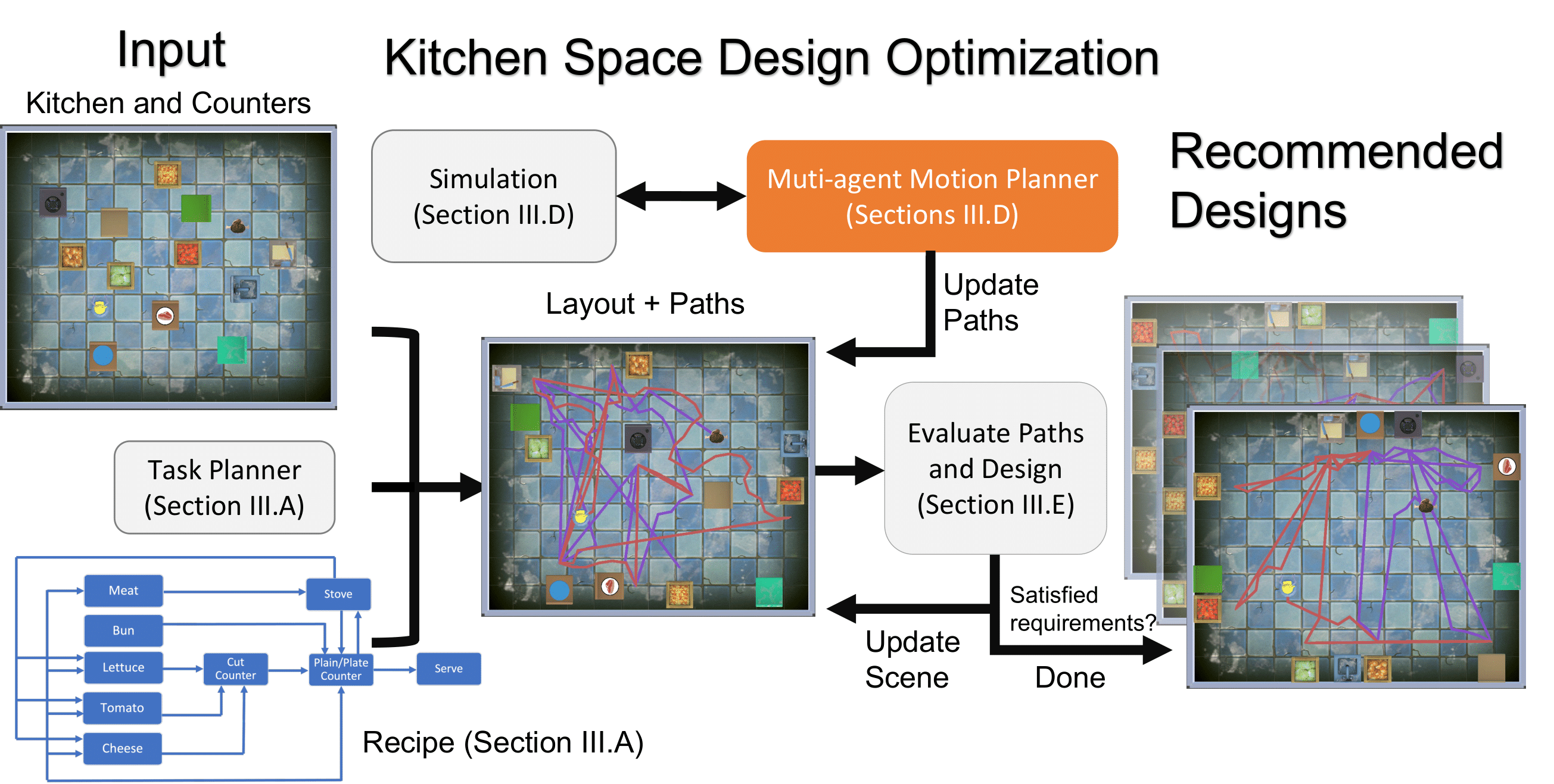
Figure 2: The overview of the proposed optimization method for kitchen space design. Given the recipes of meals that human and robot will make together, our method generates kitchen layouts that enhance the Human-Robot collaboration.
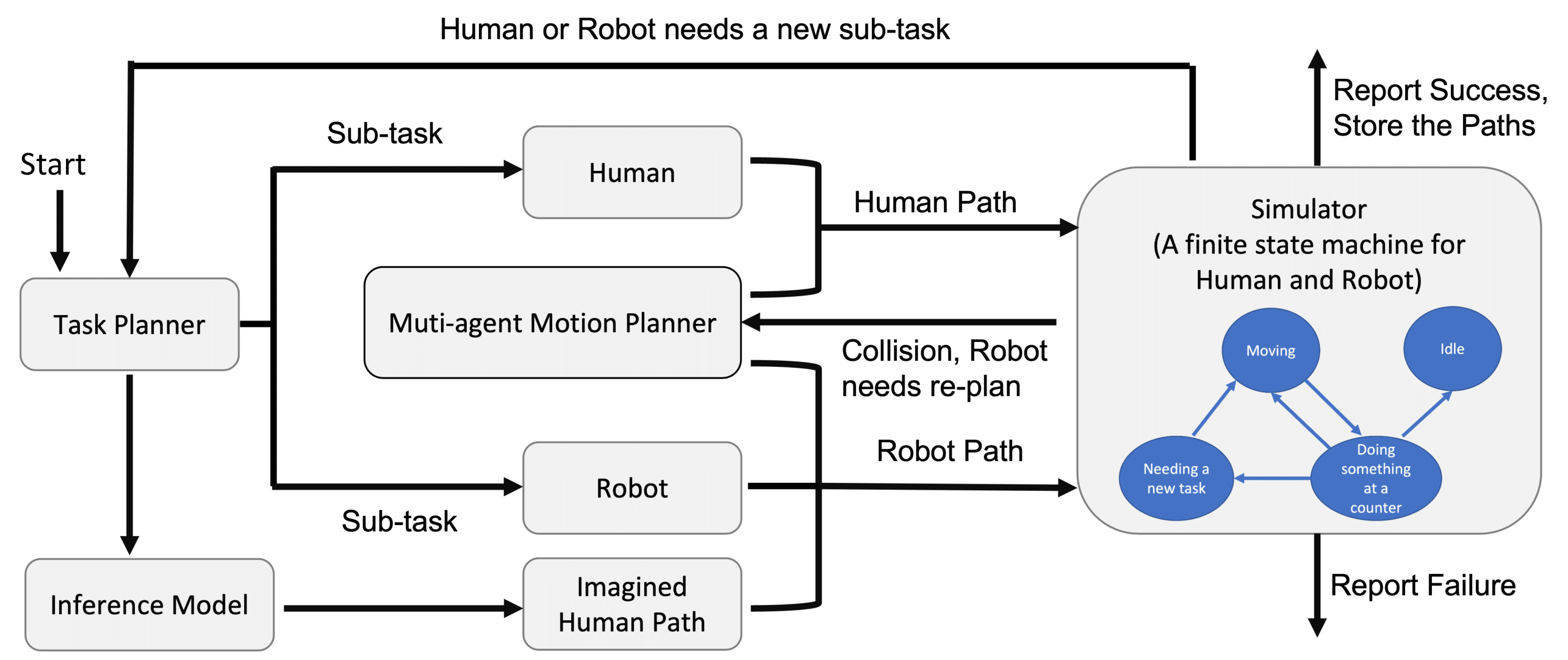
- Decentralized path planning (human priority + robot adaptation).
- Workflow: Recipe planning → multi-agent motion planning → layout optimization.
5. Significance & Impact
- Key Contributions:
- First framework to co-optimize spatial layouts and dynamic paths for human-robot teams.
- 20% faster task completion and 10% shorter paths compared to random layouts.
- Demonstrated in kitchens, industrial settings, and complex L-shaped rooms.
- Applications: Collaborative kitchens, smart factories, healthcare logistics.
6. Download & Citation
- Download: IEEE Xplore (DOI: 10.1109/LRA.2024.3519863)
- Cite (IEEE): Jixuan Zhi and Jyh-Ming Lien. “Improving Human-Robot Collaboration Via Computational Design.” IEEE Robotics and Automation Letters 10, no. 2 (2025): 1074-1081.
7. Media Kit
- Video Abstract:

8. Testimonials
“Optimized layouts reduce human-robot path conflicts by 30% and idle time by 20%.”
9. Related Work
- Prior Research: Human-Robot Coexistence Space
10. Press Coverage
The paper is presented at ICRA 2025, Atlanta, USA.